
اینورتر دلتا C200 ساخت شرکت تايوانی دلتا در محدوده بين 37.0 کيلو وات تا 5.7 کيلو وات توليد می گردد. از نظر ولتاژ ورودی سه مدل از اين درايو با ولتاژهای ورودی اینورتر دلتا تکفاز 230 ولت و سه فاز 230 ولت و سه فاز 460 ولت وجود دارد.
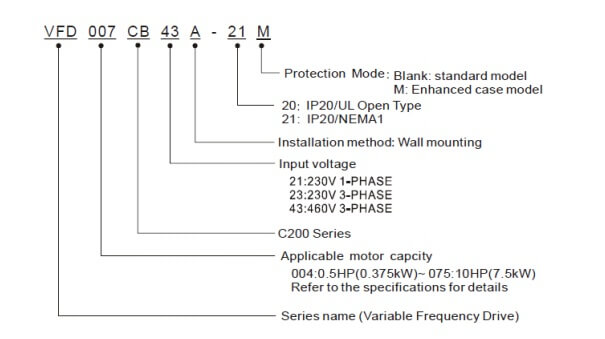
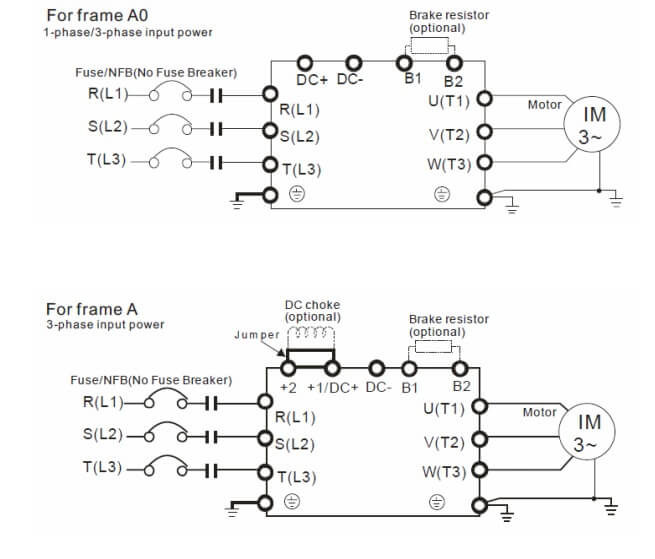
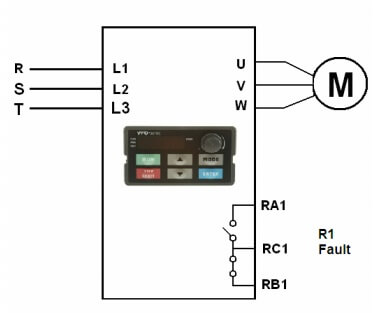
درايو C200 را می توان به دو صورت control speed و control torque بکار گرفت. مدار قدرت و مدار کنترل اين درايو در شکلهای زير نشان داده شده است.
اين اینورتر دلتا دارای 10 ورودی ديجيتال شامل ورودی های FWD و REV و 1 MI تا 8 MI همچنين دارای سه ورودی آنالوگ AVI ،ACI و AUI است.
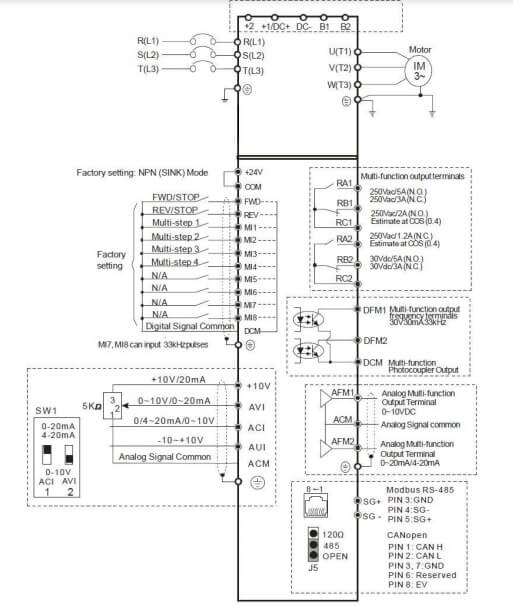
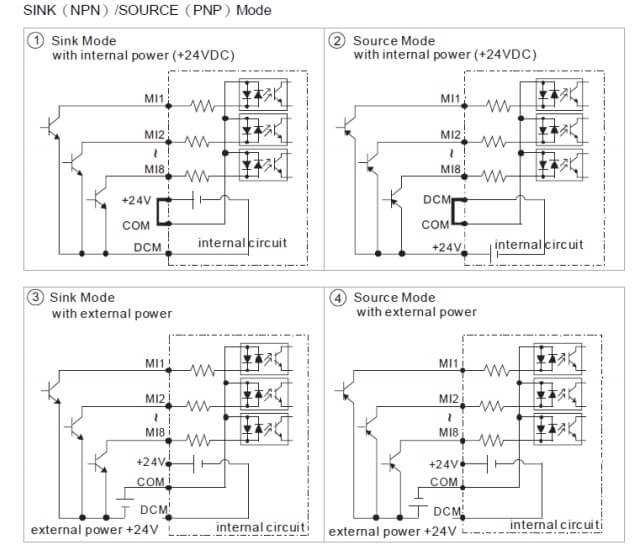
همچنين اینورتر دلتا دو خروجی رله ای ، دو خروجی ترانزيستوری ديجيتال، دو خروجی آنالوگ و يک پورت سريال هم در اختيار دارد. روش اتصال ورودی های ديجيتال در دو حالت npn و pnp با منبع تغذيه خارجی يا بدون آن در شکل زير نشان داده شده است .
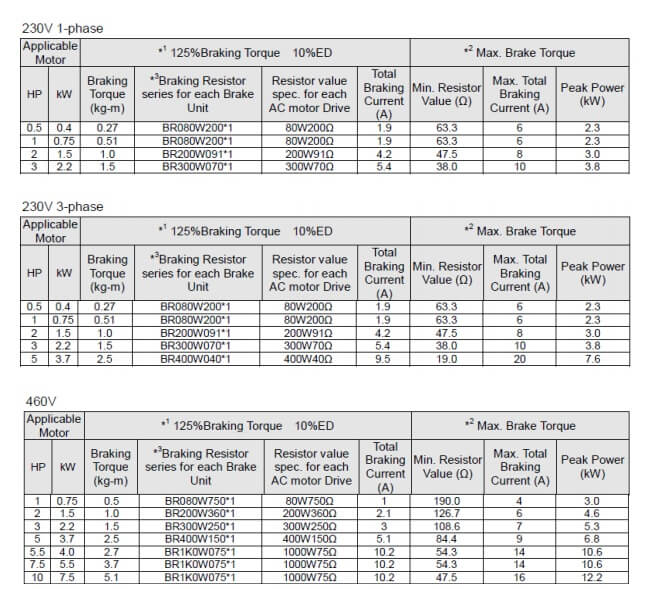
مقاومت ترمز بين ترمينال های B1 و B2 مدار قدرت وصل می گردد. اینورتر دلتا مقدار اين مقاومت و توان آن بستگی به توان درايو دارد. مقدار و توان مقاومت ترمز را در جداول زير ميتوانيد جستجو نماييد.
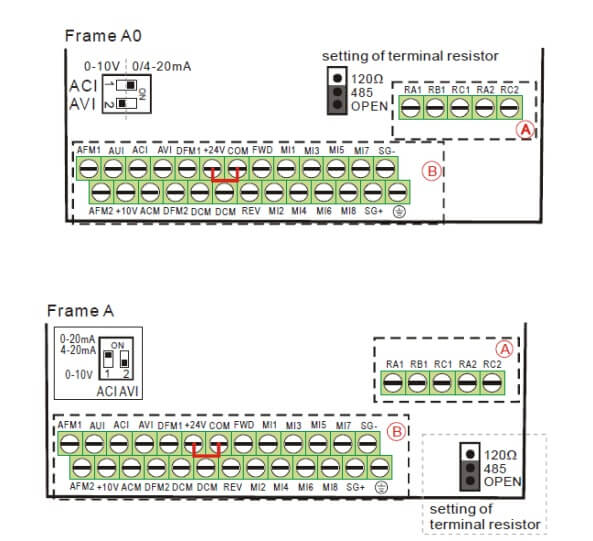
ترتيب قرارگيری ترمينال های کنترلی برای درايوها با فريم های A0 و A را در شکل زير دنبال نماييد.
کی پد (KEYPAD): کی پد مورد استفاده برای اين درايو در شکل زير نشان داده شده است.
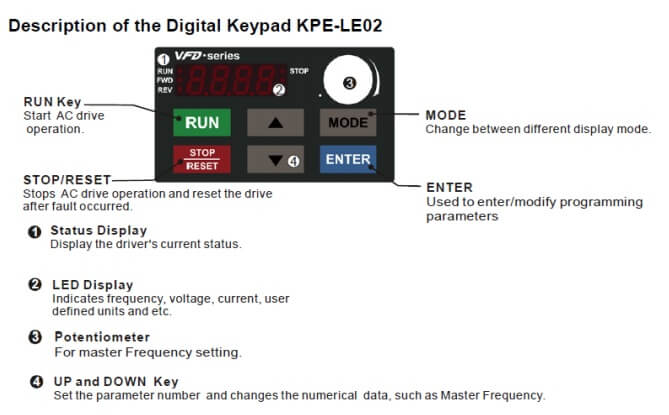
اين کی پد LE02-KPE نام دارد. در حالتی که فرمان اینورتر دلتا برروی حالت دستی قرار دارد از کليدهای Run و Reset/stop برای فرمان حرکت و توقف به موتور استفاده می شود. از کليد Reset/stop می توان برای رفع خطا Fault نيز استفاده نمود.
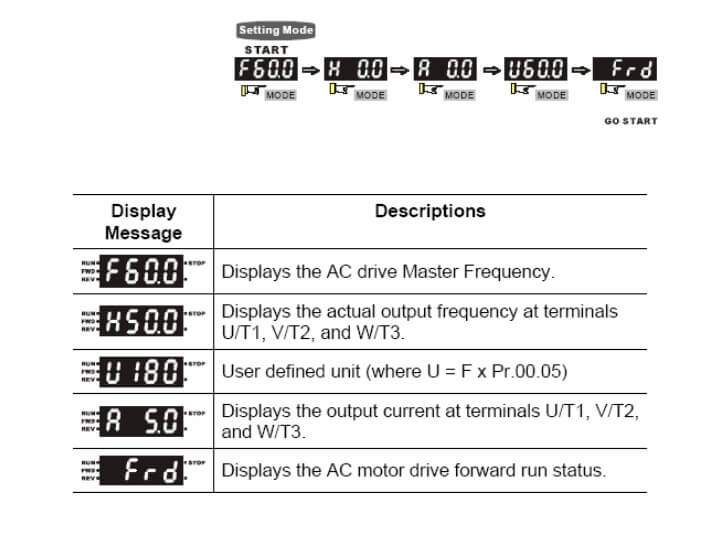
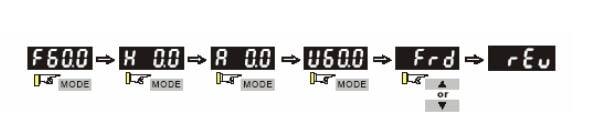
0.F60 فرکانس frequency Master را نشان می دهد. اين فرکانس توسط پتانسيومتر و يا کليدهای جهت بالا و پايين و به روش های ديگر قابل تنظيم و تغيير است. چندين بار کليد Mode را فشار دهيد عبارتی که با H شروع می شود سرعت خروجی درايو و عبارتی که با u شروع می شود تنظيم user را نشان می دهد اين تنظيم می تواند
بطور مثال سرعت خروجی درايو به صورت RPM باشد. عبارتی که با A شروع می شود جريان خروجی درايو را نمايش می دهد. جهت چرخش موتور به صورتهای Frd يعنی راستگرد و rEv به صورت چپگرد خواهد بود. جهت چرخش موتور را می توانيد در اين بخش تغيير دهيد.
از کليد Enter نيز برای تغيير پارامترها و برای save نمودن تغييرات در پارامترها استفاده می شود. نمايشگر اين درايو 4 رقمی است. زمانی که بطور مثال قصد تغيير پارامتر 04.02 را داريم ابتدا کليد Enter را فشار می دهيد دو رقم سمت چپ نمايشگر عبارت 00 را نشان خواهد داد. اين يعنی که در گروه پارامتری 00 قرار داريد. با کليد جهت بالا مقدار اين عدد را بر روی 02 قرار دهيد. دراين صورت وارد گروه پارامتری 02 خواهيد شد. کليد Enter را فشار دهيد عبارت 00.02 نمايش داده می شود.
در حال حاضر در پارامتر 00.02 هستيد. کليد جهت بالا را فشار دهيد دو رقم سمت راست صفحه نمايش تغيير خواهد کرد. به پارامتر 04.02 که رسيديد کليد Enter را فشار دهيد. مقدار عددی داخل اين پارامتر نمايش داده می شود. با کليدهای جهت بالا و پايين مقدار اين عدد را تغيير دهيد. اگر کليد Enter را فشار دهيد مقدار جديد برای پارامتر save می گردد و عبارت End برای يک لحظه نمايش داده می شود. اگر هم مشکلی در تنظيم پارامتر وجود داشته باشد عبارت Err نمايان می گردد.
دوبار کليد Mode را فشار دهيد تا از مد پارامتردهی خارج شويد. برای تغيير جهت گردش موتور از طريق صفحه کليد (کی پد) ابتدا کليد Mode را فشار دهيد تا به عبارت Frd يا rEv برسيد با کليد جهت بالا يا پايين جهت چرخش را تغيير دهيد.
روش کنترلی اینورتر دلتا
روش کنترلی درايو توسط پارامتر 10-00 تعيين می گردد. همچنين روش کنترل درايو به صورت کنترل سرعت در پارامتر 11-00 و به صورت کنترل گشتاور در پارامتر 13-00 تنظيم می گردد. اگر از درايو برای منظورهای کنترل سرعت استفاده می کنيد پارامتر 10-00 را بر روی Speed=0 قرار دهيد. اگر هم از درايو برای کاربرد های کنترل گشتاور استفاده می کنيد مقدار 10-00 برروی 2 تنظيم شود.
در پارامتر 11-00 می توانيد نوع کنترل سرعت را تعيين نماييد. برای کاربردهای f/v ساده مقدار پارامتر 11-00 برروی صفر تنظيم می گردد. اگر از انکودر برروی موتور برای فيدبک سرعت استفاده می کنيد می توانيد روش VFPG را انتخاب کنيد. برای اين منظور مقدار پارامتر 11-00 برروی عدد 1 تنظيم گردد. Frd راستگرد است و تغيير آن به rEv باعث می گردد موتور چپگرد بچرخد. کليد Mode را بزنيد و از اين مد خارج شويد.
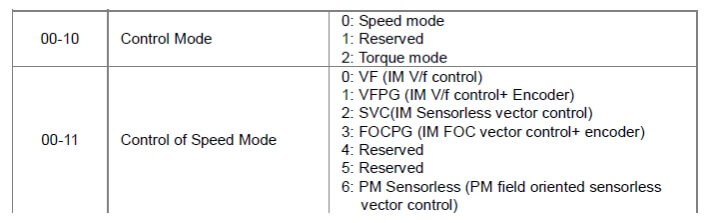
اگر مقدار پارامتر 11-00 را برروی 2 تنظيم کنيد روش کنترل برداری حلقه باز و اگر بر روی 3 تنظيم کنيد روش کنترل برداری حلقه بسته با استفاده از انکودر امکان پذير می گردد. تمامی موارد 0 تا 3 مربوط به موتورهای القايی آسنکرون است. اگر از موتورهای سنکرون با رتور آهنربای دائمی (موتورهای PM (استفاده می کنيد می بايست مقدار پارامتر 11-00 را بر روی 6 تنظيم کنيد. در اين صورت روش کنترل برداری حلقه باز برای يک موتور PM قابل بکارگيری است.
بازگشت به تنظيمات کارخانه اینورتر دلتا
پارامتر 02-00 برای ريست نمودن پارامترهای درايو بکار می رود. اگر عدد 9 را در پارامتر 02-00 قرار دهيد تمامی پارامترهای اين درايو با مقادير کارخانه ای بارگيری خواهد شد.
مرجع فرمان اینورتر دلتا
پارامتر 21-00 مرجع فرمان درايو در حالت Auto و پارامتر 31-00 نيز مرجع فرمان درايو در حالت hand را مشخص می نمايد. اگر بر روی کی پد درايو کليدهای Auto و hand وجود داشته باشد سوئيچ نمودن بين اين دو حالت به راحتی انجام می گيرد اما برای درايوهايی که روی کی پد چنين کليدهايی ندارند امکان استفاده از ورودی های ديجيتال برای سوئيچ نمودن بين دو حالت hand و auto وجود دارد.
اگر پارامترهای 21-00 و 31-00 برروی صفر تنظيم گردد فرمان حرکت و توقف از روی کی پد صادر می گردد. چنانچه اين دو پارامتر را برروی 1 تنظيم کنيد. فرمان ها توسط ورودی های ديجيتال اعمال می گردد.
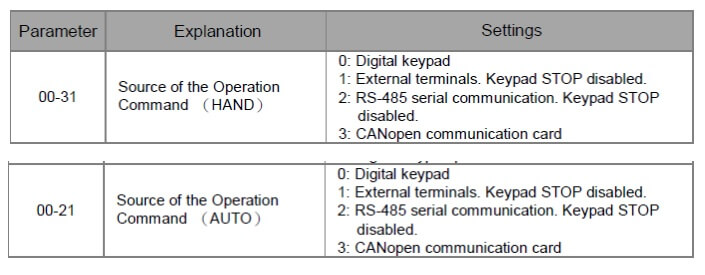
برای اينکه درايو از طريق ارتباط سريال Rs485 يا شبکه CANopen فرمان بگيرد، مقدار پارامترهای 21-00 و 31-00 را بر روی 2 و 3 تنظيم کنيد.
مرجع انتخاب فرکانس
پارامتر 20-00 برای تعيين مرجع انتخاب سرعت در حالت Auto و پارامتر 30-00 نيز برای تعيين مرجع انتخاب سرعت در حالت hand تنظيم می گردد.
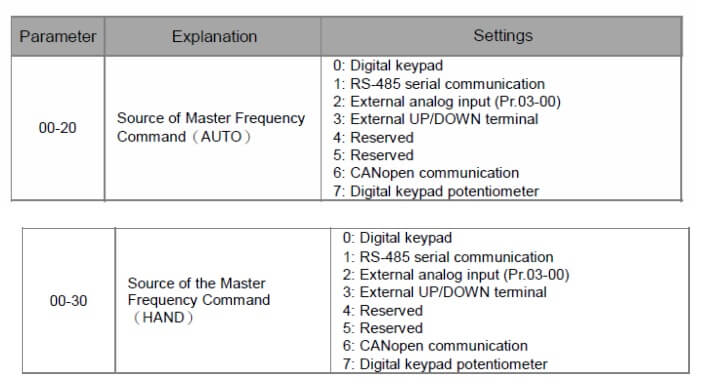
اين دو پارامتر بطور پيش فرض بر روی صفر تنظيم شده است بدين معنی که فرکانس توسط کليدهای روی کی پد تنظيم می گردد و با کليدهای جهت بالا و پايين می توانيد سرعت را افزايش و کاهش دهيد. اگر سرعت درايو از طريق ارتباط Rs485 يا از طريق شبکه open CaN تعيين می شود مقادير اين دو پارامتر برروی 1 يا 6 قابل تنظيم است. اگر سرعت توسط ورودی های آنالوگ تغيير داده می شود بطور مثال توسط يک پتانسيومتر خارجی مقدار پارامترهای 20-00 يا 30-00 را برروی 2 تنظيم کنيد.
اگر از پتانسيومتر روی کی پد برای تنظيم سرعت درايو استفاده می شود مقدار عدد 7 را در اين دو پارامتر قرار دهيد. يک روش ديگر هم وجود دارد می توانيد دوتا از ورودی های ديجيتال را به عنوان ورودی های up و down برای سرعت تعريف کنيد و با فعال نمودن اين وروديها سرعت را افزايش يا کاهش دهيد . پارامترهای 20-00 و 30-00 در اين حالت برروی 3 تنظيم خواهد شد تا امکان استفاده از اين روش فراهم گردد.
روش توقف موتور
دو روش برای توقف موتور در اين درايو وجود دارد. اگر مقدار پارامتر 22-00 را برروی صفر قرار دهيد توقف براساس Ramp و منحنی deceleration خواهد بود. اگر هم مقدار اين پارامتر را بر روی يک تنظيم کنيد توقف به صورت stop to coast انجام می گيرد. در اين روش زمانی که فرمان توقف به درايو داده می شود ارتباط موتور و درايو قطع می گردد موتور در حال چرخش پس از مدتی بطور خود بخود متوقف خواهد شد. مقدار اينرسی بار و موتور و همچنين مقدار اصطکاک در مدت زمان توقف موتور موثر است.
جهت چرخش موتور
از پارامتر 23-00 برای کنترل جهت چرخش موتور استفاده می شود. برخی از بارها مانند پمپ و فن و … فقط اجازه حرکت در يک جهت را دارند اما بسياری از بارهای ديگر در هر دو جهت می چرخند اگر پارامتر 23-00 را بر روی صفر قرار دهيد امکان چرخش موتور در هر دو جهت وجود دارد. اما اگر اين پارامتر را بر روی 1 قرار دهيد موتور فقط راستگرد و اگر بر روی 2 قرار دهيد موتور فقط چپگرد می چرخد.
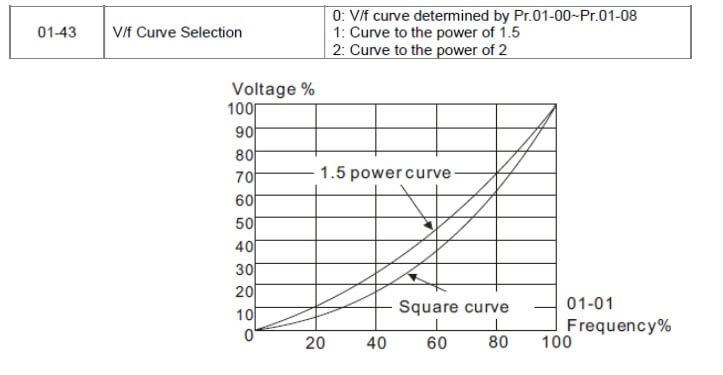
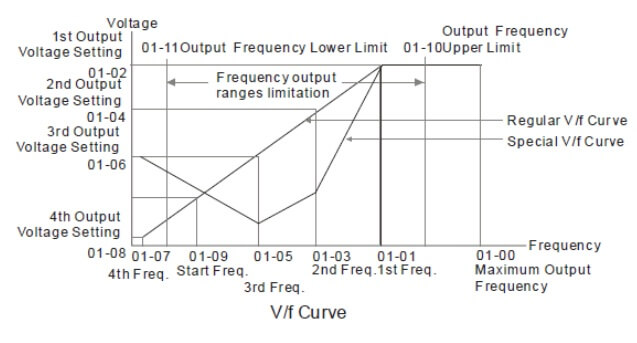
منحنی
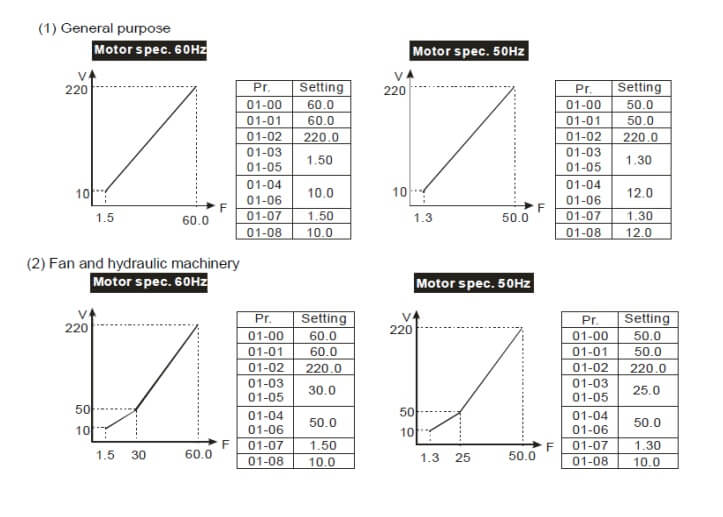
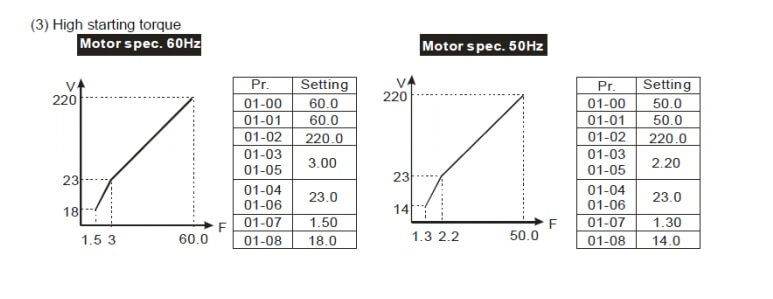
توسط پارامتر 43-01 می توانيد سه مدل تنظيمات برروی منحنی f/v را برنامه ريزی نماييد. اگر پارامتر 43-01 را برروی صفر قرار دهيد منحنی f/v را می توانيد با استفاده از پارامترهای 00-01 تا 08-01 بطور دلخواه و براساس نوع بار و گشتاور مورد نياز آن مقداردهی کنيد. اما اگر پارامتر 43-01 را برروی 1 يا 2 قرار دهيد منحنی f/v به صورت شکل زير و با ضرايب توان 5.1 و 2 بکار گرفته خواهد شد.
منحنی های شتاب
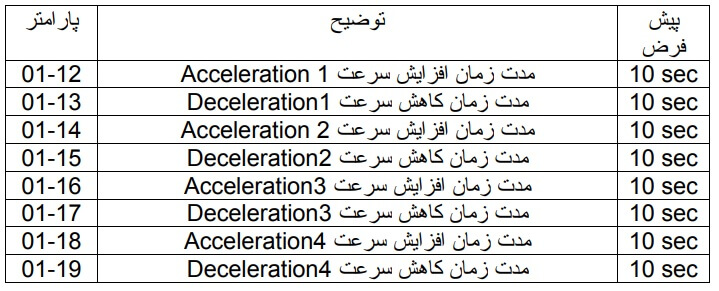
با استفاده از پارامترهای 12-01 تا 19-01 4 می توان شيب برای افزايش سرعت و 4 شيب برای کاهش سرعت تعريف نمود. اگر دوتا از ورودی های ديجيتال را برای انتخاب بين اين 4 شيب برنامه ريزی کنيد امکان بکارگيری هر 4 شيب وجود دارد ولی بدون استفاده از اين دو ورودی درايو , فقط به نرخ شيب Acceleration1 و Deceleration1 دسترسی دارد.
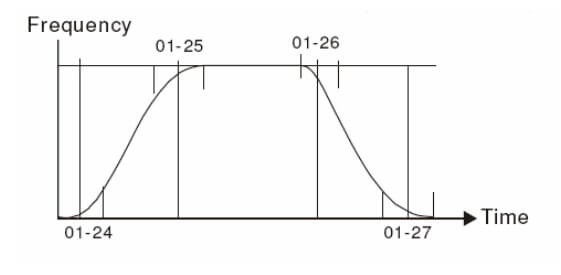
نرخ شتاب افزايش سرعت و کاهش سرعت برای فرکانس jog نيز در پارامترهای 20-01 و 21-01 تنظيم می گردد. افزايش و کاهش سرعت می تواند بصورت خطی (linear (يا به صورت curve-s باشد. پارامترهای 24-01 تا 27-01 مربوط به منحنی curve-s است.
پارامترهای 45-01 نيز واحد زمان برای افزايش و کاهش سرعت را تعيين خواهد نمود. اگر پارامتر 45-01 را بر روی صفر تنظيم کنيد ، افزايش و کاهش سرعت با پله های 01.0 ثانيه ای و اگر اين پارامتر برروی يک تنظيم شود افزايش و کاهش سرعت با پله های 1.0 ثانيه ای اجرا می شود. به فرض اينکه پارامتر 45-01 را بر روی صفر (پيش فرض) رها کنيد تنظيمات پيش فرض برای پارامترهای 24-01 تا 27-01 به صورت جدول زير خواهد بود.
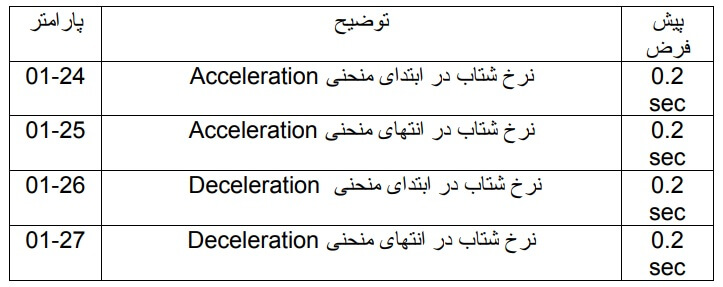
پارامترهای 24-01 تا 27-01 را می توانيد در شکل زير مشاهده کنيد.
گروه های اصلی پارامترها
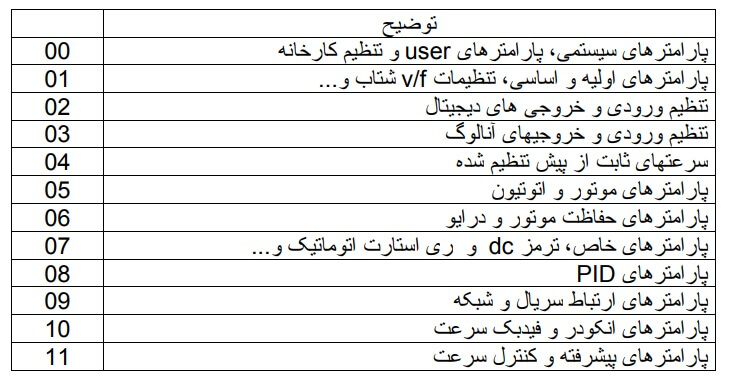
پارامترهای اين درايو در 12 گروه از 00 تا 11 تقسيم بندی شده است. جدول زير کارکرد هر گروه از پارامترهای را معرفی می نمايد.
مثال 1
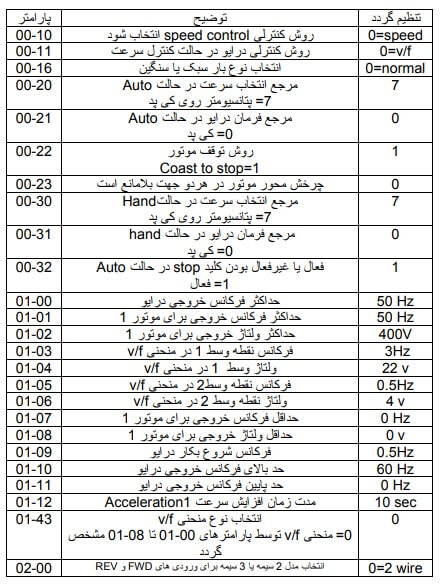
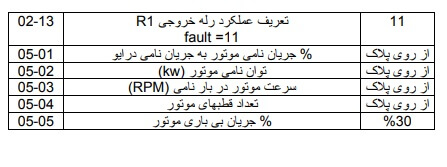
کنترل موتور از طريق کی پد
فرمان از طريق کی پد اعمال گردد و سرعت توسط پتانسيومتر روی کی پد تنظيم گردد.
توقف به روش stop to coast باشد. کنترل به روش f/v ساده و کنترل سرعت انجام گردد. امکان حرکت در هر دو جهت وجود دارد. منحنی شتاب به صورت خطی ساده تعريف شود. يکی از خروجی ها برای اعلام خطا برنامه ريزی گردد.
مثال 2
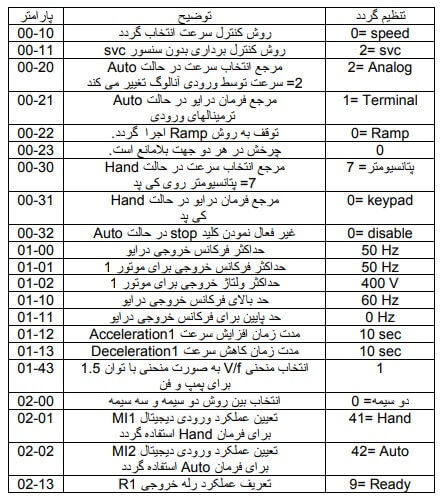
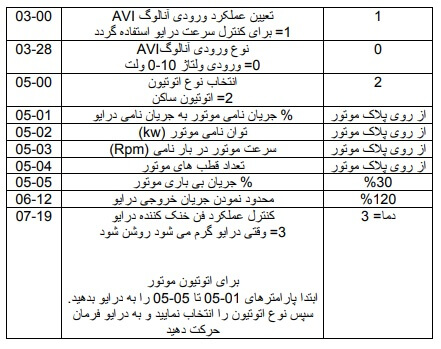
در حالت hand فرمان حرکت و توقف توسط کی پد صادر گردد و سرعت توسط پتانسيومتر تغيير داده شود. در حالت Auto فرمان حرکت راستگرد و چپگرد توسط ورودی های ديجيتال اجرا گردد و سرعت بوسيله ولتاژ ورودی آنالوگ AVI تغيير کند. دو تا از ورودی ها برای فرمان Auto و Hand برنامه ريزی گردد.

کنترل از نوع سرعت و به روش کنترل برداری بدون سنسور صورت گيرد. اتوتيون انجام شود. توقف براساس Ramp باشد. منحنی f/v توسط پارامتر 43-01 به صورت يک منحنی با توان 5.1 تعريف گردد. چرخش موتور در هر دو جهت بلامانع است کليد stop در حالت Auto غيرفعال گردد.


نظرات