
کنترل دور موتور AC چیست؟
کنترل دور موتور AC و گشتاور موتورالکتریکی برای انتقال انرژی از منبع آن به فرآیند تحت کنترل است. کنترل دور در انواع DC و AC وجود دارد امابدلیل محدودیتهای موتورهای DC نظیر قیمت، اندازه و مشکالت نگهداری امروزه از موتورهای القایی AC که از سادگی، قیمت پایین و قابلیت مناسب برخوردار هستند استفاده می شود لذا کنترل دور AC علیرغم پیچیده تر بودن بتدریج جایگزین نوع DC خود شده است. کنترل دور موتور AC به نام اینورتر و درایو AC نیز شناخته می شود.
پیشنیازهای مورد نیاز:
نام فایل: نحوه کارکرد کنترل دور موتور AC
تعداد صفحات: 11 صفحه
فرمت فایل: PDF
زبان آموزش: فارسی
برای دانلود PDF نحوه کارکرد کنترل دور موتور AC بر روی لینک زیر کلیک کنید.
قسمتی از آموزش نحوه کارکرد کنترل دور موتور AC
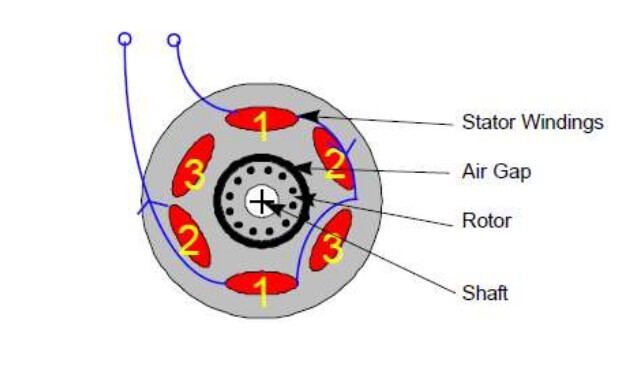
موتورهای القایی AC یا موتورهای آسنکرون Asynchronous: به منظور شناخت کارکرد اینورتر لازم است از کارکرد موتور القایی شناخت مناسبی بدست آورد. موتور القایی مانند یک ترانسفورماتور کارمیکند. هنگامی که استاتور (سیم پیچ بیرونی است که ثابت است) به یک منبع سه فاز متصل می شود یک میدان مغناطیسی دوار با فرکانس منبع تغذیه تولید می شود.
نحوه کارکرد کنترل دور موتور AC
این میدان در فاصله هوایی بین روتور و استاتور عمل کرده و باعث القای جریان در سیم پیچ های روتور می شود. این پروسه تولید نیرو در اثر جریان روتور، میدان مغناطیسی را تغییر می دهد و روتور را می چرخاند. اگر سیم پیچ ها در چندین قطب مرتب شده باشند، فرکانس چرخش میدان مغناطیسی کمی کوچکتر از فرکانس بکاربرده شده در منبع تغذیه موتور خواهد بود.
برای موتور Pole 2 و فرکانس ورودی Hz 60/50 در حدود 3600/3000 دور و برای موتور Pole 4 فرکانس Hz 60/50 در حدود Hz 1800/1500 دور خواهد بود. به هرحال اگر روتور با همان سرعت تغییر میدان مغناطیسی حرکت کند، دیگر بر روی آن گشتاوری ایجاد نخواهد شد. بنابراین روتور همیشه با سرعتی کمی کوچکتر از چرخش میدان مغناطیسی می چرخد تا گشتاور تولید کند. این تفاوت در سرعت با نام فرکانس Slip یا لغزش شناخته می شود. سرعت در این نوع موتور به سه عامل فرکانس ورودی، نحوه سیم بندی و بار بستگی دارد. بنابر این برای کنترل دور موتور باید فرکانس منبع را کنترل کرد.
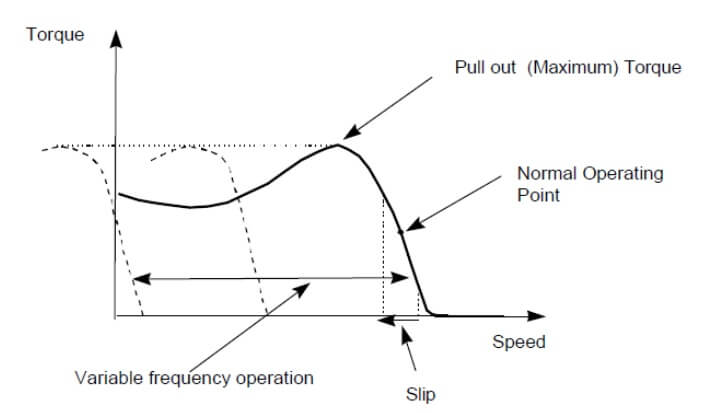
برای تغییر فرکانس، تغییر ولتاژ نیز می بایست مورد توجه قرار گیرد زیرا با کاهش فرکانس، امپدانس سیم پیچ های موتور عوض می شود و اگر قرار باشد سطح ولتاژ پایین نیاید شار مغناطیسی آنقدر بالا می رود که موتور را به حالت اشباع برده و به آن صدمه می زند. از طرفی اگر فرکانس بیش از حد نرمال افزایش یابد، ولتاژ باالتری برای حفظ ماکزیمم شار مورد نیاز است و این معموال اتفاق نمی افتد زیرا با افزایش سرعت گشتاور (Torque) کاهش پیدا می کند. بنابراین برای کنترل دور، علاوه بر فرکانس باید سطح ولتاژ نیز باید به خوبی کنترل شود. در موتور های القایی نمودار سرعت و گشتاور مطابق شکل زیر است:
نحوه کارکرد کنترل دور موتور AC



سلام ودرود خواستم تشکرکنم بابت آموزشهای الی و خوب و رایگانی که داخل سایت قراردادید واقا خدا خیرتون بده با تشکر از لطف و محبت شما